
Em outubro, os investigadores do INESC TEC contribuíram para novo levantamento de dados e mapeamento do complexo geológico Madeira-Tore. Com a ajuda do veículo autónomo EVA, foi possível recolher dados e imagens do fundo marinho até aos 1.100 metros de profundidade.
A missão foi realizada ao serviço do Instituto Português do Mar e da Atmosfera (IPMA), em colaboração com o Instituto Hidrográfico (IH) da Marinha e a Faculdade de Ciências da Universidade de Lisboa (FCUL). A bordo do NRP D. Carlos I, embarcação da Marinha Portuguesa, a equipa do INESC TEC partiu da base naval de Almada a 10 de outubro, rumo ao arquipélago da Madeira.
Nos três primeiros dias da campanha, foi efetuada a manutenção operacional da estação de observação oceanográfica IbMa-CSV, da margem Ibérica do EMSO-ERIC (European Multidisciplinary Seafloor and Water Column Observatory – European Research Infrastructure). A estrutura encontra-se instalada a sudoeste do Cabo de São Vicente, ainda ao largo de Portugal Continental. Segundo a Marinha Portuguesa, esta ação incluiu “a recolha e fundeamento de equipamentos científicos e a colheita de perfis e amostras da coluna de água”.
Em seguida, a missão prosseguiu viagem até aos montes submarinos do Madeira-Tore – mais concretamente, os Bancos Ampere e o Coral Patch. O objetivo passou pelo “levantamento de dados detalhados do fundo oceânico, através de batimetria e obtenção de imagens”, explica Carlos Almeida.
O investigador do INESC TEC conta que, “com recurso ao veículo autónomo EVA, foi possível recolher imagens de elevada resolução, bem como um mapa tridimensional do fundo, com recurso a [sonar] multifeixe”. “Os levantamentos foram efetuados entre os 600 e os 1.100 metros de profundidade, feitos a partir do NRP D. Carlos I, [navio] da Marinha Portuguesa.”

De acordo com Carlos Almeida, este tipo de ações é “crucial para perceber os ecossistemas marítimos vulneráveis”. No entanto, “as técnicas convencionais enfrentam desafios significativos”: com veículos operados remotamente (ROV), “o cabo umbilical que os conecta ao navio-mãe restringe a autonomia e alcance que podem percorrer no fundo”.
Já com sistemas rebocados (Towed Cams), “a capacidade de manter uma distância constante e ideal no fundo é afetada pelas oscilações do navio e pelas correntes, prejudicando a qualidade das imagens e dos dados de sonar de alta frequência”. Além disso, a “dificuldade em gerir a altitude aumenta o risco de colisão com obstáculos no fundo”.
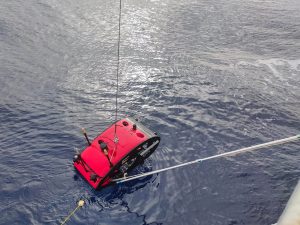
É nesse sentido que surge o AUV (Autonomous Underwater Vehicle) EVA, capaz de “mitigar estas desvantagens e com uma capacidade de mapeamento de grandes áreas com elevada resolução”. “A EVA possui um sistema de navegação e controlo muito preciso que lhe permite estar por longos períodos no fundo oceânico sabendo sempre qual é a sua posição.”
Carlos Almeida sublinha os benefícios do veículo EVA para este tipo de campanhas, uma vez que “consegue ‘voar’ a baixa altitude de forma estável, maximizando a eficácia dos sensores acústicos e óticos de alta frequência, que exigem uma maior proximidade para obter o máximo de detalhe”. “Por tudo isto, a EVA consegue cobrir grandes áreas de forma eficiente, reduzindo os custos operacionais do navio de superfície.”



No âmbito do programa Global Drifter, foram ainda lançadas três boias de observação, visando a obtenção de dados das correntes oceânicas e a colheita de amostras da coluna de água e de fitoplâncton. A missão viria a terminar a 18 de outubro, no Funchal.
O investigador mencionado na notícia tem vínculo ao INESC TEC.
 Notícias, atualidade, curiosidades e muito mais sobre o INESC TEC e a sua comunidade!
Notícias, atualidade, curiosidades e muito mais sobre o INESC TEC e a sua comunidade!