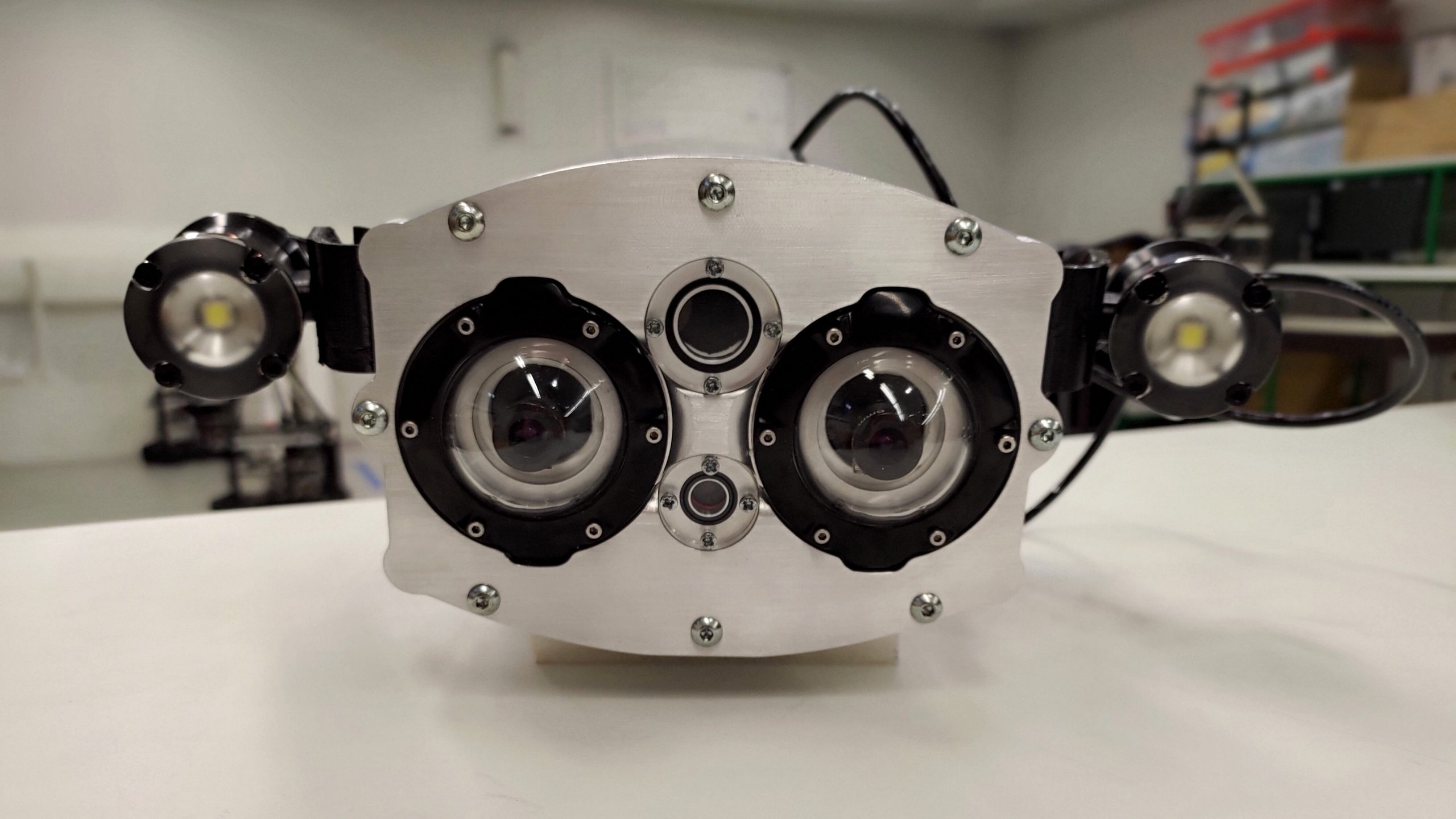
Investigadores do INESC TEC desenvolveram um sistema ótico híbrido inovador, capaz de melhorar a perceção tridimensional de soluções robóticas subaquáticas. De nome MARESye 2.0, este é um dos projetos apoiados ao abrigo do programa de financiamento interno do INESC TEC, os Internal Seed Projects.
Em concreto, o protótipo desenvolvido possibilita a extração de informação 3D precisa e texturizada em ambientes inóspitos, onde não existem fontes luminosas e onde os fenómenos físicos provocados pela propagação da luz na água degradam severamente a qualidade dos dados obtidos.
Esta versão suporta as pressões existentes a 300 metros de profundidade e recolhe informação tridimensional com uma elevada razão sinal-ruído (SNR), e é para uma utilização em soluções autónomas robotizadas na realização de tarefas de inspeção, intervenção e manutenção de estruturas submersas.
“Esta versão foi desenhada com o foco na robustez, de forma a tornar a tecnologia compacta e mais preparada para a industrialização. Torna-se assim num sistema visual que captura informação 2D e 3D que é prático a passivel de ser integrado em veículos subaquáticos, por exemplo, em Autonomous Underwater Vechicles (AUVs) ou Remotely-Operated Vehicles (ROV)”, refere Andry Maykol Pinto, investigador responsável pelo projeto no Centro de Robótica e Sistemas Autónomos (CRAS) do INESC TEC.
“Esta tecnologia foi desenvolvida para entidades empresariais que pretendam testar e incorporar as capacidades proporcionadas pela tecnologia MARESye nos seus produtos, melhorando assim a perceção tridimensional durante as inspeções subaquáticas”, acrescenta Andry Pinto.
A tecnologia MARESye pode ser aplicada, por exemplo, nas atividades de manutenção das infraestruturas de exploração de recursos em alto mar, reduzindo assim o tempo necessário à realização das operações, com impacto direto nos custos de manutenção destes equipamentos.
Com um pedido de patente internacional submetido, o projeto teve a duração de 12 meses e contou com a colaboração dos seguintes investigadores do CRAS: Andry Maykol Pinto, Pedro Nuno Leite e Aníbal Matos, bem como dos restantes elementos da equipa de Robotics-based O&M.
Os investigadores do INESC TEC mencionados na notícia têm vínculo à UP-FEUP e FCT.
 Notícias, atualidade, curiosidades e muito mais sobre o INESC TEC e a sua comunidade!
Notícias, atualidade, curiosidades e muito mais sobre o INESC TEC e a sua comunidade!